MX3D


Developing a positioning system for the robotic metal 3D printing
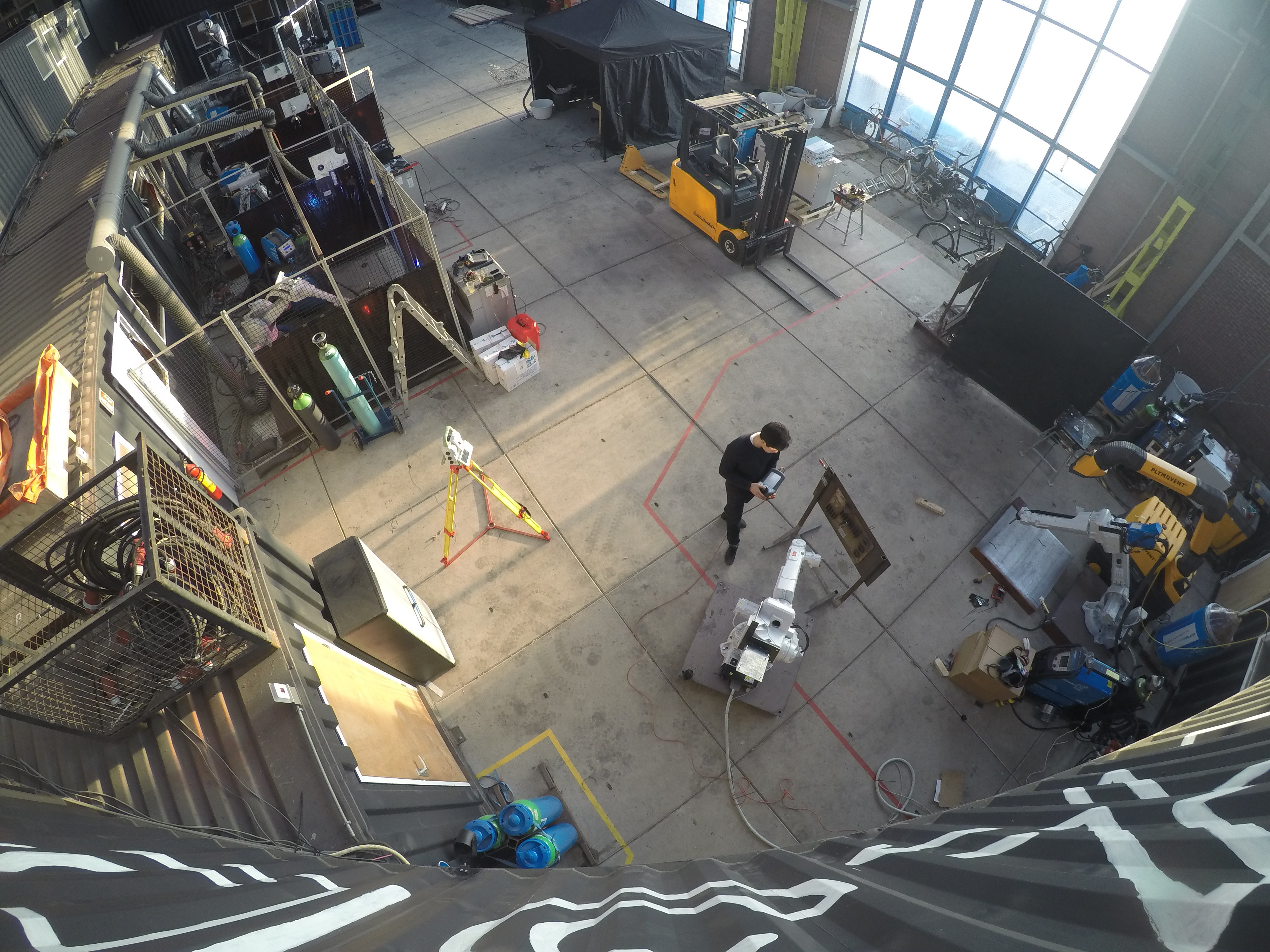
During my internship at MX3D I developed a positioning system to be used for industrial robots
that use wire arc additive manufacturing (WAAM). MX3D's proprietary
robotic metal 3D printing process that was used for the Bridge Project, would allow for
printing large structures by extending the work envelope by repositioning the industrial robots
during printing.
The main objective was to achieve a millimeter accurate repositioning sequence. To achieve this
a Leica total station was used to measure reflector prisms mounted on the robot's tool flange.
The procedure was coded in Python and RAPID and integrated into MX3D's digital fabrication
toolkit.
An important focus of this internship was combining software and design with hardware and
manufacturing. Some other side-projects I worked on during my time at MX3D:
- Point distribution for multi-walled curves [Software, Python]
- Crystalline point distribution for solids [Software, C#]
- Test printing multi-walled pipes [Fabrication]
- Designing and fabricating custom robot components [Mechanical design]