Underwater autonomous swarm

Design and simulation of an underwater swarm algorithm
Bachelor Thesis at TU Delft researching the feasibility of an autonomous underwater robot swarm
in completing specialized tasks in a simulated environment. Two different cases were used to
test the swarm. The first scenario,inspecting underwater mooring chains and the second finding
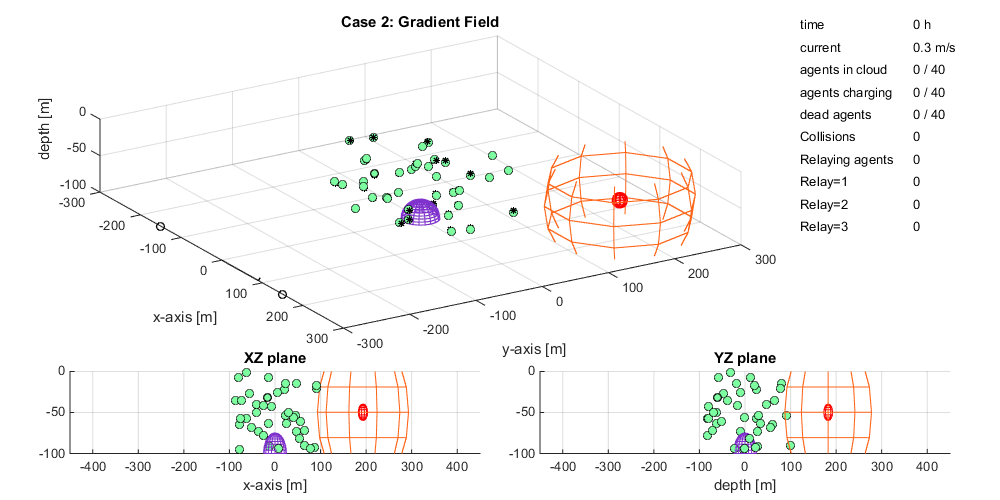
and following a moving gradient (e.g. salinity levels).
The swarm behaves following the rules of Boids swarming algorithm using agent-based modeling written in
Matlab.
Together with: Jozef Stuijt, Yannick Chance & Daan van Vrede
Supervisors: Tim Vercruyssen (PhD), Chris Verhoeven